

雷达液位计的介绍以及在波浪监测中的应用
摘要
摘要雷达测高仪除了传统的测波传感器如压力表、载波浮标、电平表等外,在波浪监测中应用越来越广泛。今天各种商用雷达高度计被用作液位计,例如在化学工业中。通过水槽试验,对两种常用的、价格相对低廉的传感器在波浪监测中的适用性进行了实验研究。第一个分析表明,需要在空间和时间分辨率方面改进商用雷达高度计。当今传感器的常见问题是噪声水平高,需要较大的平均间隔,以及传感器占用空间大。
介绍
在现场和在波流中对波的测量是用不同的技术进行的。常用传感器通过测量来推算水面高程:
•传感器(压力表)[1]上方水柱的压力
•浮舟在水面上游动时的加速度(载波浮标)
•两个金属电极之间的水柱电阻(电液表)
•无线电波脉冲从传感器到水面来回的传播时间或两个连续的无线电波信号之间的相位差,一个从传感器发射到水面,
另一个从水面反射到传感器(雷达液位计)[2]
与传统的压力表、电平表、载波浮筒等传感器相比,雷达液位计作为一种远程测量系统,由于不直接接触水体(不存在腐蚀问题,传感器不受波浪冲击),因此具有优势。然而,在使用标准雷达液位计进行海浪监测时仍存在一些问题:
•需要安装(与乘波浮标相比)。
•海水的盐度和海冰覆盖会影响无线电波脉冲在水中的穿透。
•雷达的足迹具有平均效应。
•无线电波脉冲的反射取决于水面的坡度。
因此雷达水平指标的适用性在波槽波监测测试“Schneiderberg”(星期)和“Großer Wellenkanal”(GWK) FRANZIUS-INSTITUT在汉诺威,德国,比较传统的电动水平指标(GHM波高计,西城代尔夫特)与两种不同的商业雷达水平指标(VEGAPLUS,织女星,KALESTO OTT)(图2)。
理论背景
雷达液位计是基于上述两种不同的测量原理之一。这两个原理如图1所示。
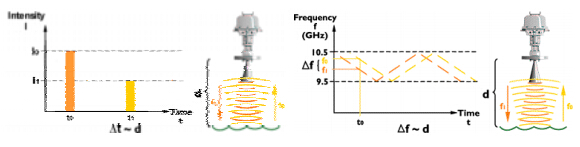
图1基于雷达脉冲行程时间(左)或调制连续雷达波束相移(右)[4]的雷达液位计测量原理
距离测量的光学方法的较简单的方法是确定的运输时间∆t短脉冲光的反射的远程目标,即水面(图1(左)。水面到传感器的距离d由
![]()
以光速c。一个高精度测量所需的时间6.6⋅10 - 12 s产生距离三米的分辨率。
一种更精确的方法是利用光学相位测距。对发射的连续无线电波的频率进行调制,如图1(右)所示。因此相移∆f之间的反射波接收和发射波发生。将发射信号与反射信号混合,得到低频信号(拍频),可提供高精度[5]距离d的实测值:
![]()
在调频调制频率和∆fmax发射机频率的偏差。
两种雷达液位计在均质反射面[6]的情况下,在0 ~ 30m范围内的液位测量精度均可达1mm。对于粗糙的表面,例如不规则波浪的水面,由于光束受表面粗糙度[7]的倾角的调节,测量误差增大。
试验装置
图2显示了安装在WKS和GWK中的不同传感器。每个雷达传感器都靠近传统的GHM传感器,以便对测量系统进行较优比较。

图2水槽WKS(左)和GWK(右)实验设置
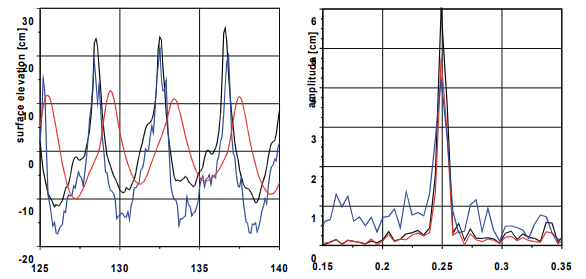
图3常规波情况下GHM波高仪(黑色)、VEGAPLUS雷达传感器(红色)、KALESTO雷达传感器(蓝色)时域(左侧)和频域(右侧)测得的水位高程(d = 0.80 m, H = 0.30 m, T = 4 s)
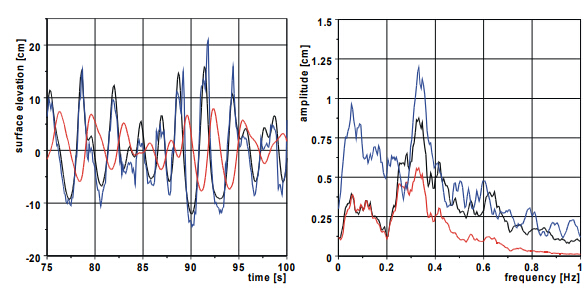
图4不规则波情况下GHM波高仪(黑色)、VEGAPLUS雷达液位计(红色)、KALESTO雷达液位计(蓝色)时域(左侧)和频域(右侧)测得的水位高程(d = 0.80 m, Hs = 0.25 m, Tp = 3 s)对仪器进行了不同波浪条件(波高、波周期、规则波/不规则波)和水位的测试。WKS的参数集包括0.80 m - 1.00 m的水位、0.05 m - 0.40 m的波高和1 s - 6 s的波周期。在GWK中,在水位为3.00 m - 5.00 m,波高为0.60 m - 1.20 m,波周期为3.5 s - 9.5 s的情况下,对传感器的行为进行了研究。图3为规则波和图4为不规则波,给出了WKS中采集的数据集示例。这两个例子分别在时域(左)和频域(右)给出。
不同传感器测得的地面高程时间图虽然在质量上相同,但在数量上存在较大差异。图3(左)给出了应用雷达液位计存在的问题的初步印象,如KALESTO雷达的信号尖峰,是由于信噪比差,相移以及VEGAPLUS测得的波幅减小造成的。后者是通过VEGAPLUS的内部滤波来提高信噪比。在频域(图3(右)和图4(右)),KALESTO问题产生的白噪声导致了对地表高程谱幅值的高估,而VEGAPLUS问题导致了对谱幅值的低估。雷达传感器可以准确地测量波周期和谱峰。
GHM传感器和雷达传感器的偏差取决于波的特性。下面分别对不同传感器的平均波高或峰值幅值的传递函数进行了详细的分析。采用归零穿越法在时域内确定了平均波高。阈值∆被选为4%的有效波高Hs振幅谱年代的计算(f):
![]()
与表面高程ζi的离散时间序列。
结果
图2为规则波,图3为不规则波,给出了波周期对GHM传感器与雷达传感器测得的波高比的影响。
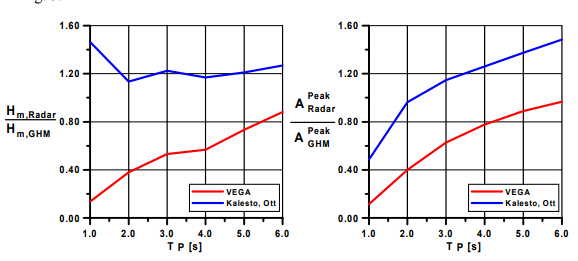
图5常规波情况下(H = 0.20 m),雷达液位计测得的波高与GHM波高计分析得到的时域(左)和频域(右)波高比
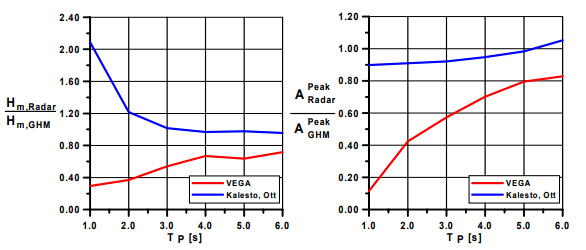
图6雷达液位计测得的有效波高与经时域(左)和频域(右)分析得到的GHM波高计测得的不规则波高之比(Hs = 0.15 m)
KALESTO(蓝色)高估了由归零穿越法确定的平均波高。对于规则波,从Hm、Radar/Hm、GHM = 1.3到1.2,对于不规则波(JONSWAP谱),从Hm、Radar/Hm、GHM = 2.0到1.0,随着波周期T或Tp从1 s增加到6 s,高估的程度降低。分析幅值谱中的峰值时,卡斯托对低波周期的幅值估计过低,对高波周期的幅值估计过高。虽然不规则波的谱幅比变化不大,但规则波的谱幅比在0.5到1.5之间。
与KALESTO相比,VEGAPLUS总是低估平均波高和谱幅值。平均波高比和谱幅值比从约x开始分别增大。在有规则波的情况下,从0.15到0.95,从大约x。0.10 ~ 0.80,波周期由1 s增加到6 s。
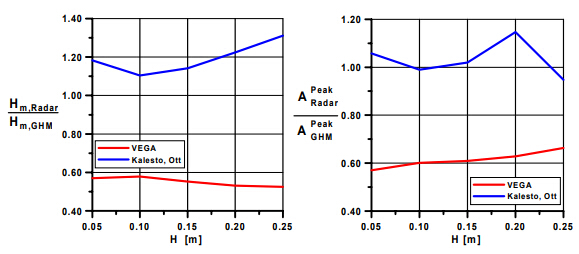
图7常规波情况下(T = 3 s),雷达液位计测得的有效波高与GHM波高计在时域(左)和频域(右)分析得到的有效波高比值
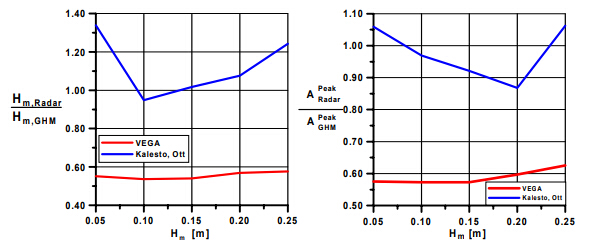
图8雷达水准仪测得的有效波高与GHM波高计分析得到的不规则波时域(左)和频域(右)的有效波高比值(Tp = 3 s)
波高对平均波高比和谱幅值的影响小于波周期的影响,图7为规则波,图8为不规则波。波高和振幅的比值光谱的峰值大约是VEGAPLUS常数(≈0.55)。KALESTO的变化范围在0.9到1.3之间。
如上所述,上述效应与KALESTO的信噪比较低以及VEGAPLUS的滤波有关。天线的孔径越大,雷达波束在海面上的足迹越小,可以改善滤波特性。使用更高的无线电频率(如24 GHz而不是9 GHz[8])也能获得同样的方向性改善。
结论
VEGAPLUS和KALESTO雷达已可用于测量缓慢水位变化(水位表/潮汐表)[9],但不具备传输功能,尚不能用于波浪监测。未来在FRANZIUS-INSTITUT波浪流场计划的实验将有助于克服这一不足,特别是通过改善雷达天线的方向性。
- [公司新闻] 磁翻板液位计有测量盲区吗 2021-12-06
- [行业新闻] 差压变送器该怎么维护 2021-11-29
- [行业新闻] 浮球液位计保养时注意事项 2021-11-25
- [公司新闻] 磁敏双色液位计与磁翻板液位计有什么区别 2021-11-16
- [公司新闻] 造成磁翻板液位计内浮子下沉的常见原因都 2021-11-10
- [技术专题] 石油储罐液位测量选择雷达液位计后的安装 2012-10-26
- [技术专题] 超声波液位计的优点和清洗方式 2012-10-20
- [技术专题] 怎样选购高温高压型磁翻板液位计 2012-10-20